
david farland
Well-known member
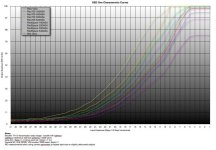
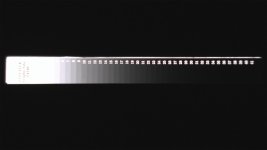
Can someone show me to some footage or still, that exhibits 11 stops thru the range?.......The Mysterium sensor uses 12bit analogue to digital converters, so the practical and theoretical limit is somewhere between 11 and less than 12 stops.
Graeme
Dave,
")
")